



เครื่องกำหนดตำแหน่งการหมุนแนวนอนสามแกน / เครื่องกำหนดตำแหน่งหุ่นยนต์เชื่อม
พารามิเตอร์ทางเทคนิค
| เครื่องกำหนดตำแหน่งเซอร์โวสามแกนแบบหมุนแนวตั้ง | เครื่องวางตำแหน่งเซอร์โวสามแกนแบบหมุนแนวนอน | ||||||
| หมายเลขซีเรียล | โครงการ | พารามิเตอร์ | พารามิเตอร์ | หมายเหตุ | พารามิเตอร์ | พารามิเตอร์ | หมายเหตุ |
| 1 | พิกัดโหลด | 500 กก. | 1,000 กก. | ภายในรัศมี R400 มม. ของแกนที่สอง | 500 กก. | 1,000 กก. | ภายในรัศมี R400mm/R500mm ของแกนที่สอง |
| 2 | รัศมีการหมุนมาตรฐานของแกนหมุน | R1200 มม. | R1500 มม. | R1200 มม. | R1800 มม. | ||
| 3 | รัศมีการหมุนมาตรฐานของเพลาตอบโต้ | R400 มม. | R500 มม. | R400 มม. | R500 มม. | ||
| 4 | มุมพลิกแกนแรก | ±180° | ±180° | ±180° | ±180° | ||
| 5 | มุมการหมุนแกนที่สอง | ±360° | ±360° | ±360° | ±360° | ||
| 6 | ความเร็วการพลิกกลับที่กำหนดของแกนแรก | 50°/วินาที | 24°/ใต้ | 50°/วินาที | 24°/ใต้ | ||
| 7 | ความเร็วรอบการหมุนที่กำหนดของแกนที่สอง | 70°/ใต้ | 70°/ใต้ | 70°/ใต้ | 70°/ใต้ | ||
| 8 | ความแม่นยำในการวางตำแหน่งซ้ำ | ±0.10 มม. | ±0.20 มม. | ±0.10 มม. | ±0.20 มม. | ||
| 9 | มิติขอบเขตของกรอบการเคลื่อนที่ (ความยาว×ความกว้าง×ความสูง) | 2200มม.×800มม. ×90มม. | 3200มม.×1000มม. ×110มม. | 2200มม.×800มม. ×90มม. | 3200มม.×1000มม. ×110มม. | ||
| 10 | ขนาดโดยรวมของตัวเลื่อนตำแหน่ง (ความยาว×ความกว้าง×ความสูง) | 4000มม.×700มม. ×1650มม. | 5200มม.×1000มม. ×1850มม. | 4000มม.×700มม. ×1650มม. | 4500มม.×3600มม. ×1750มม. | ||
| 11 | ความสูงกึ่งกลางของการหมุนแกนแรก | 1350 มม. | 1500 มม. | 800 มม. | 1,000 มม. | ||
| 12 | เงื่อนไขการจ่ายไฟ | สามเฟส 200V±10%50HZ | สามเฟส 200V±10%50HZ | สามเฟส 200V±10%50HZ | สามเฟส 200V±10%50HZ | พร้อมหม้อแปลงแยก | |
| 13 | ระดับฉนวนกันความร้อน | H | H | H | H | ||
| 14 | น้ำหนักสุทธิของอุปกรณ์ | ประมาณ 1800 กก. | ประมาณ 3000 กก. | ประมาณ 2000 กก. | ประมาณ 2000 กก. | ||
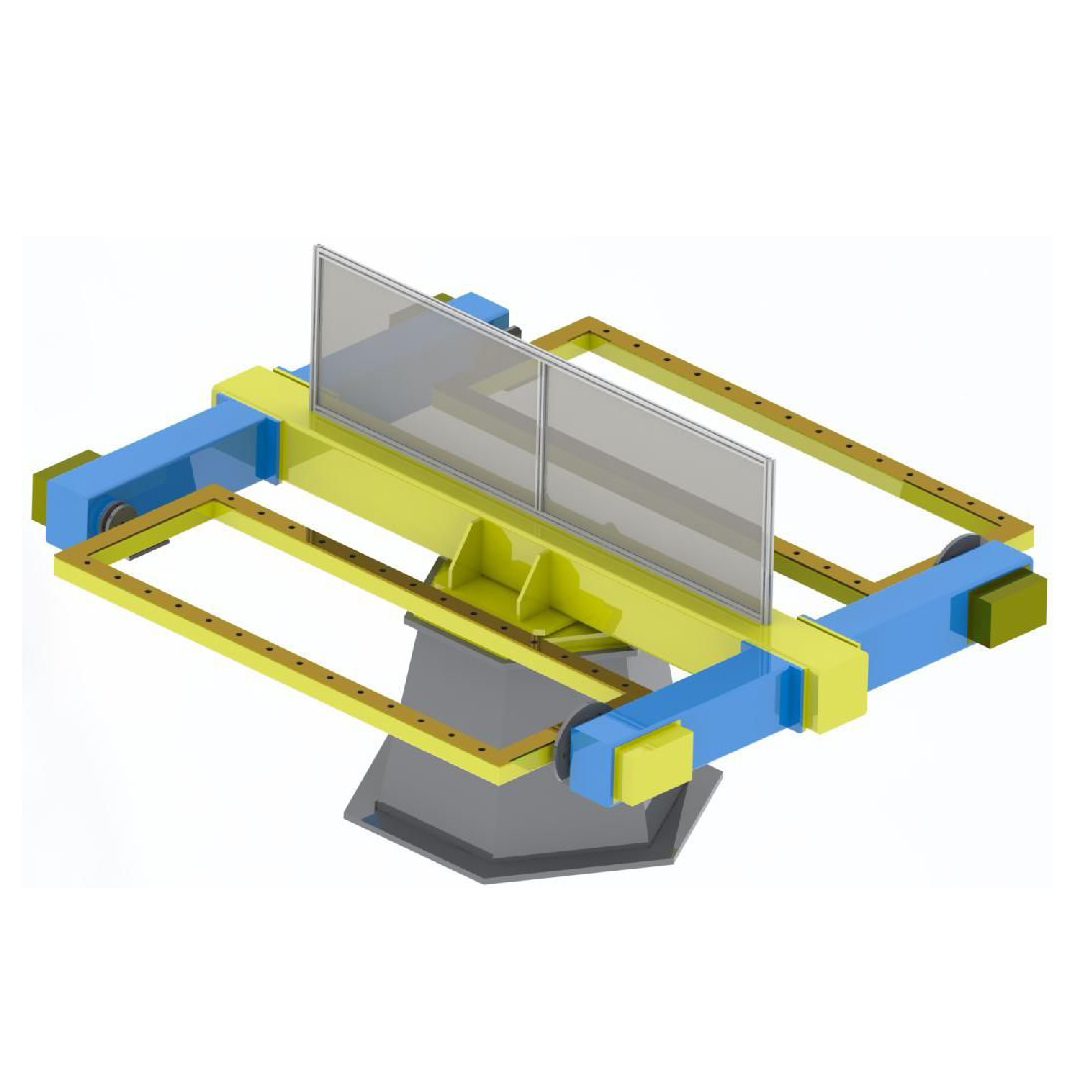
เครื่องวางตำแหน่งเซอร์โวสามแกนแบบหมุนแนวนอน

เครื่องกำหนดตำแหน่งเซอร์โวสามแกนแบบหมุนแนวตั้ง
บทนำโครงสร้าง
เครื่องวางตำแหน่งเซอร์โวแบบหมุนแนวตั้งสามแกนประกอบด้วยโครงเชื่อมแบบบูรณาการ โครงการเคลื่อนที่แบบหมุน มอเตอร์เซอร์โว AC และตัวลดความแม่นยำ RV ตัวรองรับแบบหมุน กลไกการนำไฟฟ้า โล่ป้องกัน และระบบควบคุมไฟฟ้า
โครงเชื่อมแบบอินทิกรัลเชื่อมด้วยโปรไฟล์คุณภาพสูง หลังจากการอบอ่อนและคลายความเค้นแล้ว จะต้องผ่านกระบวนการตัดเฉือนโดยช่างมืออาชีพเพื่อให้มั่นใจถึงความแม่นยำและความแม่นยำของตำแหน่งสำคัญในการตัดเฉือนสูง พื้นผิวถูกพ่นด้วยสีกันสนิมที่สวยงามและหนา และสามารถปรับเปลี่ยนสีได้ตามความต้องการของลูกค้า
โครงเหล็กแบบ Turnover Displacement จะต้องเชื่อมด้วยเหล็กโปรไฟล์คุณภาพสูงและผ่านกระบวนการกลึงด้วยเครื่องจักรมืออาชีพ พื้นผิวจะต้องผ่านการกลึงด้วยรูเกลียวมาตรฐานสำหรับติดตั้งเครื่องมือจัดตำแหน่ง และต้องดำเนินการทาสี ขัดเงา และป้องกันสนิม
มอเตอร์เซอร์โว AC พร้อมตัวลด RV ถูกเลือกเป็นกลไกกำลังซึ่งสามารถรับประกันความเสถียรของการหมุน ความแม่นยำของการวางตำแหน่ง และ
ทนทานยาวนานและอัตราความล้มเหลวต่ำ กลไกนำไฟฟ้าทำจากทองเหลืองซึ่งมีประสิทธิภาพในการนำไฟฟ้าที่ดี ฐานนำไฟฟ้าใช้ฉนวนในตัวซึ่งสามารถป้องกันมอเตอร์เซอร์โว หุ่นยนต์ และแหล่งจ่ายไฟเชื่อมได้อย่างมีประสิทธิภาพ
ระบบควบคุมไฟฟ้าใช้ PLC Omron ของญี่ปุ่นในการควบคุมตำแหน่ง มีประสิทธิภาพการทำงานที่เสถียรและอัตราความล้มเหลวต่ำ เลือกใช้อุปกรณ์ไฟฟ้าจากแบรนด์ดังทั้งในและต่างประเทศ เพื่อรับประกันคุณภาพและความเสถียรในการใช้งาน
แผ่นป้องกันแสงประกอบด้วยโปรไฟล์อลูมิเนียมและแผ่นพลาสติกอลูมิเนียมเพื่อป้องกันแสงอาร์กที่เกิดขึ้นระหว่างการเชื่อมและการตัด








